Ақпараттық 4D шаттл конвейер жүйесі





шынжырлы конвейер
| жоба | Негізгі деректер | Ескерту |
| модель | SX-LTJ-1.0T -600H | |
| Қозғалтқыш редукторы | SEW | |
| құрылым түрі | Рама алюминий қорытпасынан жасалған, ал аяқтары мен иілімдері көміртекті болаттан жасалған | |
| басқару әдісі | Қолмен/жеке/онлайн/автоматты басқару | |
| қауіпсіздік шаралары | Электрлік құлыптау, екі жағында қорғаныс бағыттаушылары бар | |
| стандартты қабылдау | JB/T7013-93 | |
| пайдалы жүктеме | Ең көбі 1000 кг | |
| жүкті тексеру | Фотоэлектрлік сенсорлар | АУРУ/ӨМ+ӨМ |
| шынжырлы жол | Төмен үйкелісті нейлон жол | |
| конвейер тізбегі | Дунхуа тізбегі | |
| подшипник | Фукуяма жабдықтары, тығыздалған шар мойынтіректері | |
| беру жылдамдығы | 12 м/мин | |
| Беттік өңдеу және жабын | Тұздау, фосфаттау, бүрку | |
| шуды бақылау | ≤73 дБ | |
| беткі жабын | компьютерлік сұр | Тіркелген үлгілер |
Жабдық құрылымы
Конвейер рамадан, аутриггерлерден, жетек блогынан және т.б. тұрады. Рама алюминий қорытпасынан жасалған, ал екі ұшы бекітілген тіссіз кері айналдыру дөңгелектері. Конвейер тізбегі P=15,875 мм қадамы бар түзу екі қатарлы тізбек. Тізбек тірегі өздігінен майланатын әсері бар жоғары молекулалық полиэтиленнен (UHMW) жасалған. Дәнекерленген аутриггерлер негізгі рамамен болт қысым пластинасы арқылы байланысқан, M20 бұрандасын реттеу аяқтары жерге қосылған, ал тасымалдау бетінің биіктігін +25 мм-ге реттеуге болады. Жетек құрылғысы ортасында кіріктірілген баяулату қозғалтқышынан, жетек білігінің жинағынан, беріліс жұлдызшасының жиынтығынан, қозғалтқыш орындығынан және шынжырды тарту құрылғысынан тұрады, ал бұранда тәрізді реттеуші кергіш шкив тасымалдау тізбегін тартады.
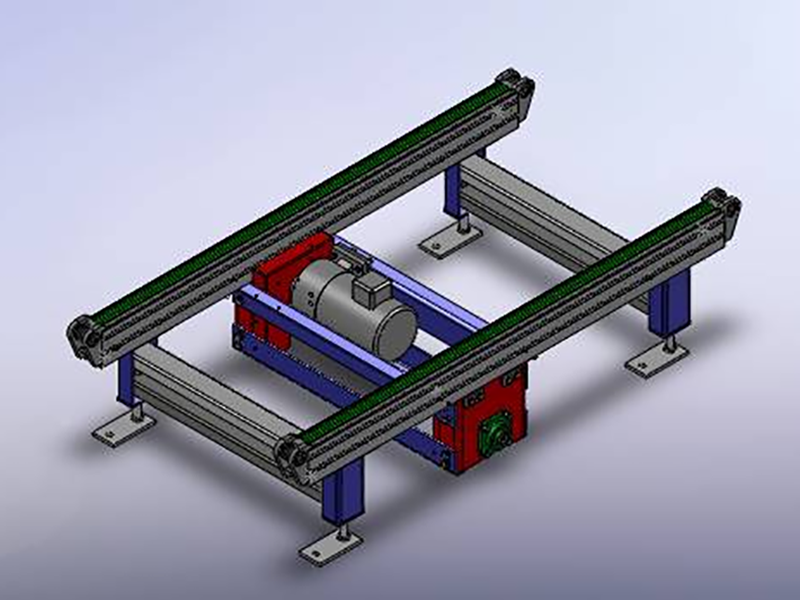
жұмыс принципі:
Қозғалтқыш жетек білігін беріліс тобы арқылы жүргізеді, ал жетек білігі паллеттің тасымалдау функциясын орындау үшін тасымалдау тізбегін жүргізеді.
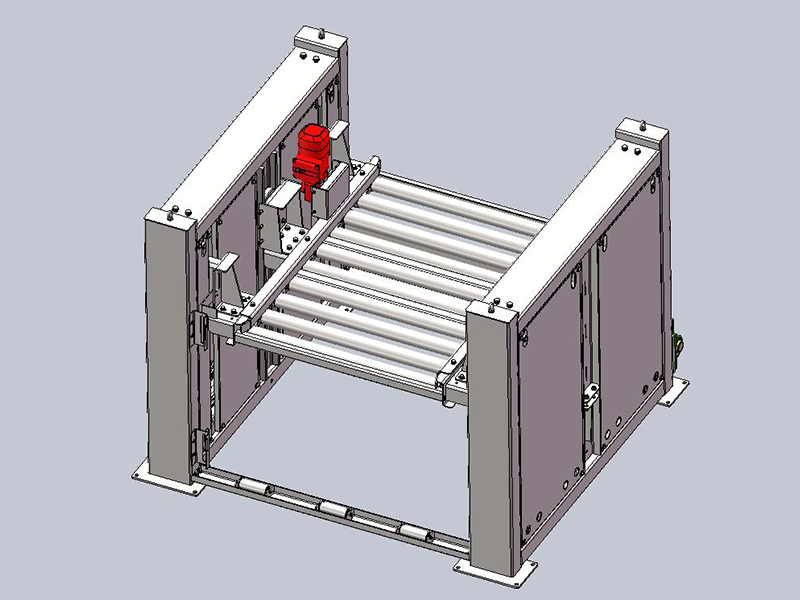
Роликті конвейер
| Тауар | Негізгі деректер | Ескертпелер |
| Модель | SX-GTJ-1.0T -600H | болат құрылым |
| Қозғалтқыш редукторы | SEW | |
| құрылым түрі | көміртекті болаттың иілуі | |
| басқару әдісі | Қолмен/жеке/онлайн/автоматты басқару | |
| пайдалы жүктеме | Ең көбі 1000 кг | |
| беру жылдамдығы | 12 м/мин | |
| ролик | 76 қос тізбекті ролик | |
| жетек тізбегі | Хуадун тізбекті фабрикасы | |
| подшипник | Ha осі | |
| Беттік өңдеу және жабын | Тұздау, фосфаттау, бүрку | |
Жабдық құрылымы
Жабдықтың құрылымы: Роликті үстел машинасы рамадан, аутриггерлерден, роликтерден, жетектерден және басқа да агрегаттардан тұрады. Ролик φ76x3 бір жақты қос жұлдызшалы мырышталған ролик, ролик аралығы P=174,5 мм, бір жақты қос жұлдызша. Дәнекерленген аутриггерлер негізгі рамамен болт қысым тақтасы арқылы байланысқан, M20 бұрандасын реттеу аяқтары жерге қосылған, ал тасымалдау бетінің биіктігін +25 мм-ге реттеуге болады. Жетек құрылғысы ортасында кіріктірілген баяулатқыш қозғалтқыштан, беріліс жұлдызшасы жиынтығынан, қозғалтқыш орындығынан және шынжырды тарту құрылғысынан тұрады.
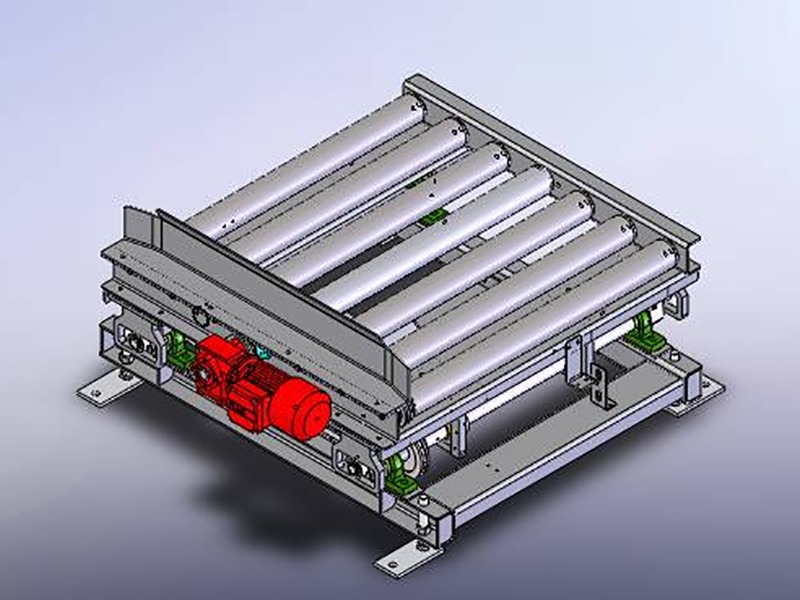
Жұмыс принципі: Қозғалтқыш роликті шынжыр арқылы жүргізеді, ал ролик конвейердің тасымалдау функциясын орындау үшін басқа шынжыр арқылы көршілес роликке, содан кейін басқа роликке беріледі.
Доктарлау және тасымалдау машинасы
| жоба | Негізгі деректер | Ескерту |
| модель | SX-YZJ-1.0T-6 0 0H | болат құрылым |
| Қозғалтқыш редукторы | SEW | |
| құрылым түрі | көміртекті болаттың иілуі | |
| басқару әдісі | Қолмен/жеке/онлайн/автоматты басқару | |
| қауіпсіздік шаралары | Электрлік құлыптау, екі жағында қорғаныс бағыттаушылары бар | |
| Стандартты | JB/T7013-93 | |
| пайдалы жүктеме | Ең көбі 1000 кг | |
| жүкті тексеру | Фотоэлектрлік сенсорлар | АУРУ/ӨМ+ӨМ |
| ролик | 76 қос тізбекті ролик | |
| Мойынтіректер мен корпустар | Мойынтірек: Харбин білігі; Мойынтірек орны: Фушань FSB | |
| беру жылдамдығы | 12 м/мин | |
| Беттік өңдеу және жабын | Тұздау, фосфаттау, бүрку | |
| шуды бақылау | ≤73 дБ | |
| беткі жабын | компьютерлік сұр | Тіркелген үлгілер |
Жабдық құрылымы
Жабдықтың құрылымы: Роликті тасымалдау машинасы тасымалдаушы бөлшектерден, көтеру механизмдерінен, бағыттаушы компоненттерден және басқа да агрегаттардан тұрады. Тасымалдау бетінің биіктігін реттеу +25 мм. Көтеру механизмі қозғалтқышпен басқарылатын иінді рычаг принципін қолданады, ал басқару құрылғысы ортасында кіріктірілген редуктор қозғалтқышынан, беріліс жұлдызшасы жиынтығынан, қозғалтқыш орындығынан және шынжырды тарту құрылғысынан тұрады.
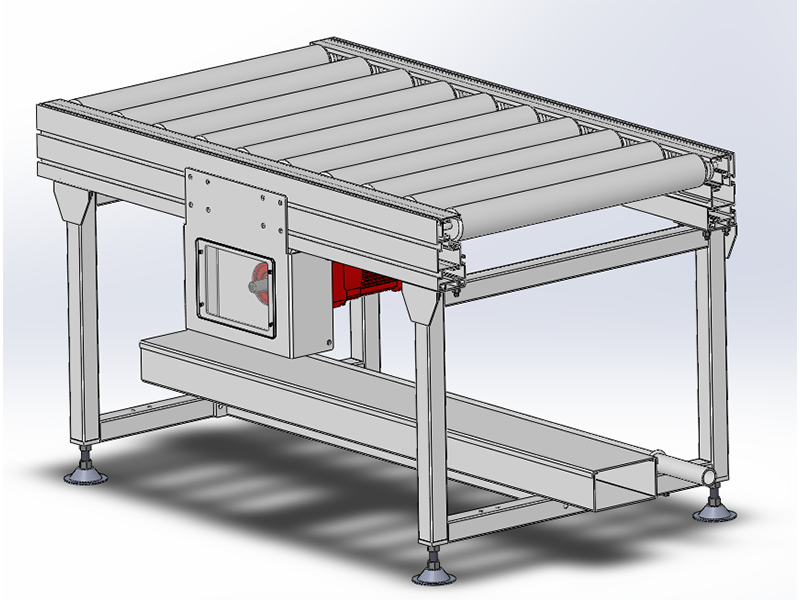
Жұмыс принципі: Паллет жабдыққа сәйкес конвейер арқылы жеткізілгенде, домкрат қозғалтқышы іске қосылып, паллетаны көтеру үшін кулак механизмін іске қосады, ал домкрат қозғалтқышы орнына келгенде тоқтайды; тасымалдау қозғалтқышы іске қосылып, паллетаны док жабдығына жеткізеді, ал қозғалтқыш тоқтайды, домкрат қозғалтқышы іске қосылады, ал кулак механизмі жабдықты түсіру үшін іске қосылады, ал орнына келгенде, домкрат қозғалтқышы жұмыс циклін аяқтау үшін тоқтайды.
Өтпелі конвейер
| 1) жоба | Негізгі деректер | Ескерту |
| модель | SX-GDLTJ-1.0T-500H-1.6L | |
| Қозғалтқыш редукторы | SEW | |
| құрылым түрі | Аяқтар және иілген көміртекті болат | |
| басқару әдісі | Қолмен/жеке/онлайн/автоматты басқару | |
| қауіпсіздік шаралары | Электрлік құлыптау, екі жағында қорғаныс бағыттаушылары бар | |
| Стандартты | JB/T7013-93 | |
| пайдалы жүктеме | Ең көбі 1000 кг | |
| жүкті тексеру | Фотоэлектрлік сенсорлар | АУРУ/ӨМ+ӨМ |
| шынжырлы жол | Төмен үйкелісті нейлон жол | |
| конвейер тізбегі | Дунхуа тізбегі | |
| Мойынтіректер мен корпустар | Мойынтірек: Харбин білігі, мойынтірек орындығы: Фукуяма FSB | |
| беру жылдамдығы | 12 м/мин | |
| Беттік өңдеу және жабын | Тұздау, фосфаттау, бүрку | |
| шуды бақылау | ≤73 дБ | |
| беткі жабын | компьютерлік сұр | Тіркелген үлгілер |
Жабдық құрылымы
Жабдықтың құрылымы: Бұл жабдық көтергіш пен сөренің түйіскен жерінде қолданылады, ал конвейер рамадан, аутригерлерден және жетек блогынан тұрады. Конвейер тізбегі P=15,875 мм қадамы бар түзу екі қатарлы тізбек. Тізбек тірегі өздігінен майланатын әсері бар жоғары молекулалық полиэтиленнен (UHMW) жасалған. Аяқтар сөре корпусына қосылған. Жетек құрылғысы ортасында кіріктірілген баяулату қозғалтқышынан, жетек білігінің жинағынан, беріліс жұлдызшасы жиынтығынан, қозғалтқыш орындығынан және тізбекті тарту құрылғысынан тұрады, ал бұрандалы реттегіш кергіш шкив тасымалдау тізбегін тартады.
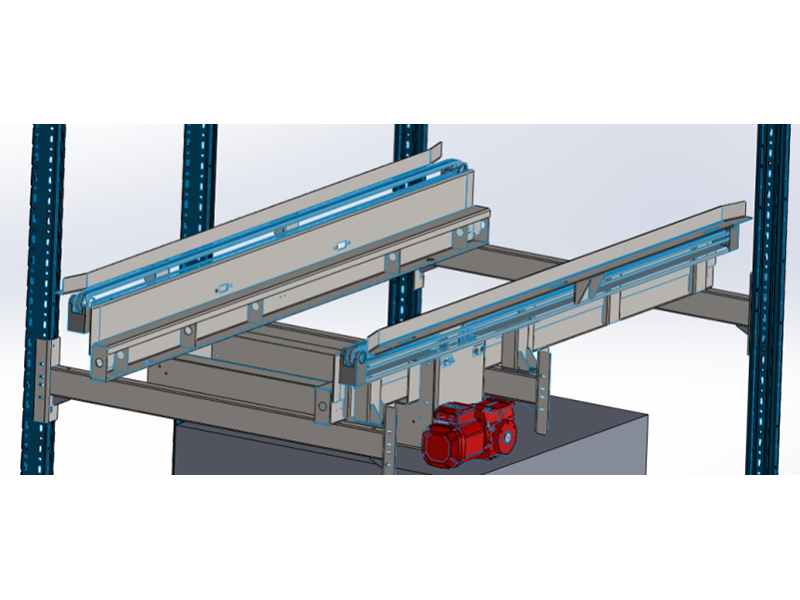
Жұмыс принципі: Қозғалтқыш жетек білігін беріліс тобы арқылы жүргізеді, ал жетек білігі паллеттің тасымалдау функциясын орындау үшін тасымалдау тізбегін жүргізеді.
еден лифтісі
| жоба | Негізгі деректер | Ескерту |
| модель | LDTSJ-1.0T-700H | болат құрылым |
| Қозғалтқыш редукторы | SEW | |
| құрылым түрі | Баған: көміртекті болат иілу Сыртқы жағы: болат пластина тығыздағышы | |
| басқару әдісі | Қолмен/жеке/онлайн/автоматты басқару | |
| қауіпсіздік шаралары | Электрлік құлыптау құрылғысы, құлаудан қорғау құрылғысы | |
| Стандартты | JB/T7013-93 | |
| пайдалы жүктеме | Ең көбі 1000 кг | |
| жүкті тексеру | Фотоэлектрлік сенсорлар | АУРУ/ӨМ+ӨМ |
| ролик | 76 қос тізбекті ролик | |
| көтергіш тізбек | Дунхуа тізбегі | |
| подшипник | Жалпы мойынтіректер: Харбин білігінің кілттік мойынтіректер: NSK | |
| жүгіру жылдамдығы | Тасымалдау жылдамдығы: 16 м/мин, көтеру жылдамдығы: 6 м/мин | |
| Беттік өңдеу және жабын | Тұздау, фосфаттау, бүрку | |
| шуды бақылау | ≤73 дБ | |
| беткі жабын | компьютерлік сұр | Тіркелген үлгілер |
негізгі құрылымы мен ерекшеліктері
Рама: баған ретінде 5 мм көміртекті болаттан жасалған иілген пластина пайдаланылады, ал сырты болат пластинамен тығыздалған;
Көтергіш бөлік:
Көтергіштің жоғарғы жағына көтергіш рама орнатылған, рама көміртекті болаттан жасалған, ал көтергіш қозғалтқыш көтергіш жұлдызша жинағын тізбек арқылы жұмыс істеуге жетелейді.
Жүктеу платформасы:
Көміртекті болаттан жасалған. Тиеу платформасы стандартты конвейермен жабдықталған.
жұмыс принципі:
Көтергіш қозғалтқыш көтеру жұмыстарын аяқтау үшін тиеу платформасын басқарады; тиеу платформасындағы конвейер тауарлардың лифтке кедергісіз кіруіне және шығуына мүмкіндік береді.



